Почему квадрокоптеры еще не летают человеческими пилотами?
Разве они не были бы более стабильными и простыми в управлении, чем вертолеты?
Разве они не были бы более стабильными и простыми в управлении, чем вертолеты?
Нет, не будут.
Quadcopters не имеют никакой специальной своиственной стабилности. Когда вы увеличиваете силу одного из роторов для того чтобы тангаж, увеличивая тангаж не сделает что-нибыдь к разнице в силы и поэтому питчинг моменту.
Преимущество квадрокоптеров заключается в том, что роторы могут иметь фиксированный шаг, в то время как одно-или двухроторный вертолет нуждается в сложном механизме управления. В то время как это-огромное преимущество для мелкомасштабных устройств, где каждый ротор может быть приведен в действие его собственным простым электродвигателем, сложность или дополнительных двигателей или длинных трансмиссионных валов перевесила бы любое преимущество от более простых роторов в полномасштабном транспортном средстве.
И почему полномасштабные вертолеты не могут использовать электродвигатели, как маленькие? Причина в том, что когда вы масштабируете аэродинамический профиль вверх , подъемная сила, которую он производит , увеличивается с его площадью, которая растет со второй силой размера, но ее вес увеличивается с объемом, который растет с третьей силой размера. Поэтому модели имеют гораздо больше подъемной силы для веса и могут позволить себе простые, но относительно тяжелые батареи, в то время как полноразмерные самолеты нуждаются в двигательных установках с более высокой плотностью мощности.
А еще есть фактор безопасности. В случае сбоя питания вертолеты все еще могут скользить по земле и приземляться вертикально с помощью авторотации. Но так как скорость вращения ротора не может быть изменена без мощности, управление вертолетом во время такого маневра требует ротора с переменным шагом. Таким образом, основное преимущество квадрокоптеров.
Фактически, аргумент area / volume является аргументом, почему большие вертолеты должны быть квадрокоптерами. Для того чтобы произвести равный подъем, одиночному Ротору нужна такая же область, которая значит что лезвия Ротора должны быть дважды как длинны как для квадрокоптера, и таким образом 8 времен вес. И на квадрокоптере наконечники Ротора также останутся дозвуковыми немного дольше.
Наличие центра подъема над центром масс не увеличивает стабильность, это было ошибкой, которая привела к странной конструкции первых ракет Годдарда, где двигатель и сопло были установлены над COM на раме. Проблема в том, что как объект вращается, так и вектор тяги. Единственная причина, по которой Ротор должен быть выше COM, — это если вы поместите его ниже, он быстро разберет объекты / людей в непосредственной близости
В то время как наличие центра подъема над центром массы не увеличивает стабильность, наличие центра сопротивления (диска Ротора) над центром массы увеличивает стабильность.
@CortAmmon — наклон роторов внутрь не дает вам двугранный эффект Al la fixed wing aircraft — он просто уменьшает моменты качения, создаваемые роторами, немного и соединяет ротор с горизонтальной силой. Как свидетельствует недавний крах, который у меня был, квадроциклы в лучшем случае нейтрально стабильны. Любая стабильность, проявленная в полете, обусловлена их системами управления полетом, компенсирующими это.
@CortAmmon, угловые роторы могут дать вам подобный эффект диэдра, но имейте в виду, что диэдр не дает вам стабильности в рулоне. Это дает вам стабильность в соединении сторон-выскальзывания и рыскать-крена. И quadcopters не имеют вертикальные стабилизаторы для того чтобы дать им другую половину, соединение крен-рыскания, завершить петлю стабилности для крена (второго порядка, с голландским креном как режим колебания).
Это (вроде) было сделано:

Компания, которая сделала это, работает над более полезной версией.
Важно отметить, что в авиации масштабирование чрезвычайно сложно. Модели самолетов имеют номера производительности, о которых люди могут только мечтать.
Я надеюсь, что авиационный инженер сможет ответить на проблемы расширения модели. Я думаю, что номер Рейнольда замешан, но я не знаю достаточно.
Все гораздо проще. Подъем пропорционален площади, масса пропорциональна объему. При увеличении масштаба последний растет быстрее.
Видео Волокоптера youtube.com/watch?v=RUGfXD0SW5Q
@easymoden00b выглядит так. Похоже, хорошее » шасси» 🙂
Квадрокоптеры не являются эффективной конструкцией — один большой Ротор гораздо более эффективен, чем четыре меньших Ротора. Причина, по которой квадрокоптеры стали популярными, заключается в том, что они механически проще, безопаснее (из-за меньших роторов) и намного проще управлять программным обеспечением.
Тем не менее, последние достижения в области машинного обучения сделали так, что вертолеты могут управляться программным обеспечением. Я ожидал бы увидеть возрождение беспилотных летательных аппаратов в вертолетном стиле из-за этого.
Наконец, я не инженер по аэронавтике, но я подозреваю, что есть значительная заслуга в объединении атрибутов квадрокоптера и вертолета. Представьте себе один большой Ротор фиксированного шага, приводимый в движение электродвигателем. Несколько небольших дополнительных роторов с электроприводом могут обеспечить необходимый шаг, рыскание и управление креном. Электричество было бы произведено эффективным газовым двигателем, вращающимся на почти постоянной скорости. Достаточная резервная сила приземлиться смогла быть обеспечена небольшими батареями. Эта конструкция была бы весьма надежна должная к большим надежности и простоте моторов и фикчированных роторов тангажа.
Достижения придут, но медленно, поскольку затраты и опасности транспортных средств для перевозки людей настолько высоки.
Продвинутая тактика также несколько сделала это!
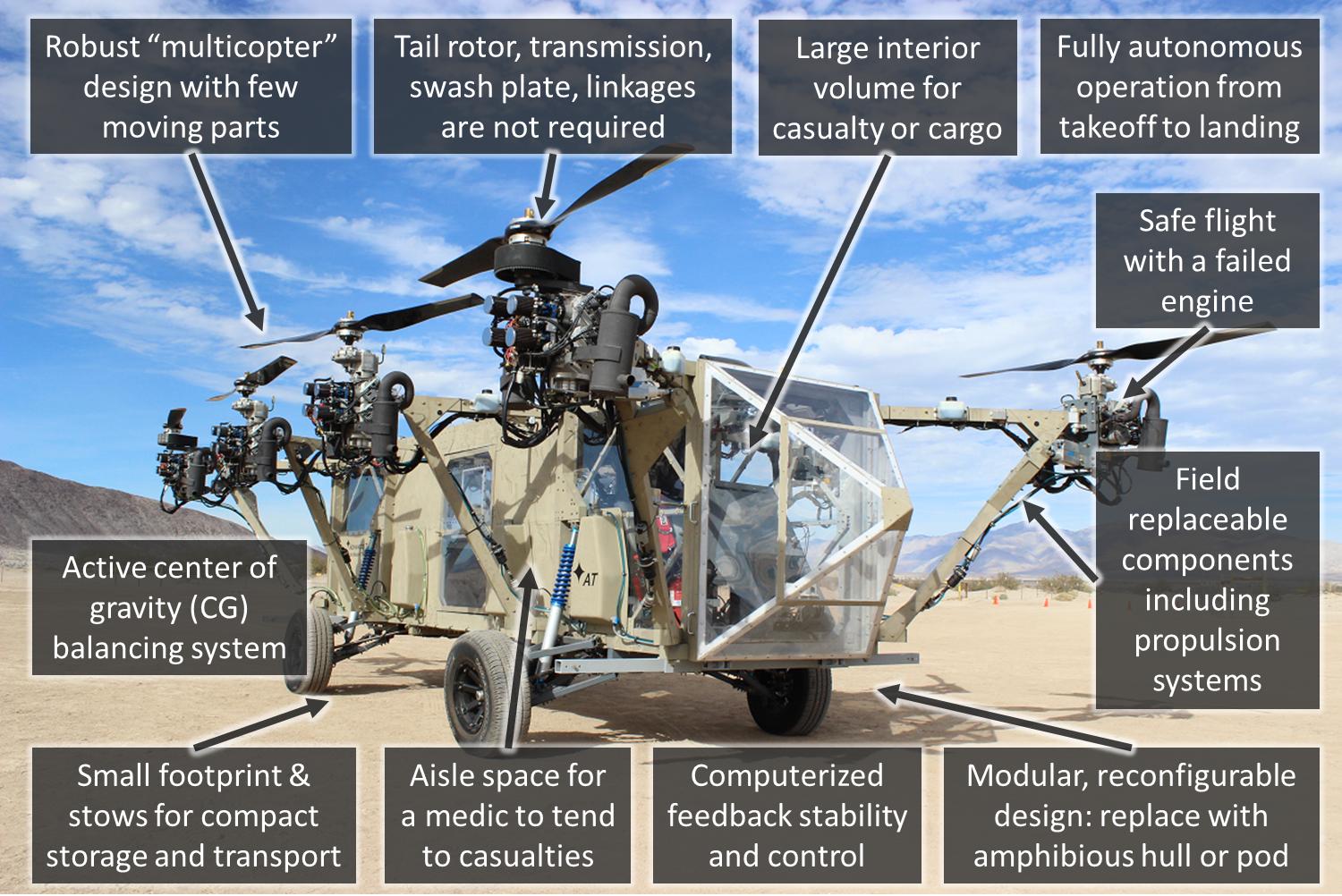
Видео первого полета трансформера Black Knight было выпущено на Youtube.
Это нуждается в записи здесь en.wikipedia.org/wiki/Category:Eight-engined_aircraft
Четыре роторных вертолета были фактически первыми вертолетами…
Raúl Pateras Pescara, Buenos Aires, Argentina, 1916

Etienne Oehmichen, Paris, France, 1921
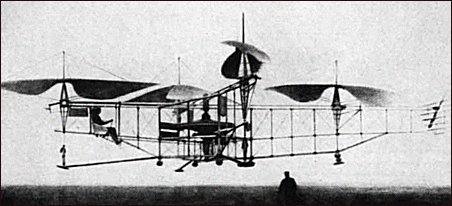
Кто сказал, что нет? en.wikipedia.org/wiki/Quadcopter#Early_attempts
Хорошая точка. На самом деле я не спрашиваю, почему никто не пытался, А почему он еще не был принят.
Кажется, что происходит какое-то серьезное развитие:) – gizmag.com/go/4645/picture/15365
Если бы атмосфера Земли была толще (или у нас была слабая гравитация), то это было бы более осуществимо-С. f. Аватар.
Автомобили достаточно сложны с одним ротором, но чем больше инерция в лопастях, тем легче они. С кучей небольших роторов, автомобили будут очень трудно.