У меня вопрос о феномене флаттера. Как известно, флаттер возникает, когда два режима (например, первый режим и второй режим) совпадают (то есть после определенной скорости частоты двух режимов будут одинаковыми и равными) и член демпфирования изменится на положительный, что приведет к отказу.
Однако в некоторых случаях частоты двух мод не совпадают идеально (они не равны) и отрицательный знак параметра затухания изменится на положительный, что означает, что происходит флаттер.
Почему это происходит? Почему частоты двух мод не могут совпадать идеально?
Флаттер происходит, когда частота двух мод совпадает. Эти моды должны быть разной природы, чтобы их частоты могли двигаться в разных направлениях. Типичными примерами являются упругие моды (с собственными частотами, не зависящими от скорости) и аэродинамические моды (с собственными частотами, пропорциональными скорости). Когда скорость полета увеличивается, аэродинамический режим становится быстрее (подумайте о динамическом давлении как о жесткости пружины в системе пружинной массы), в то время как упругий режим остается постоянным. В какой-то момент оба имеют одинаковую частоту, но флаттер уже появляется, когда они достаточно близки, поэтому каждый создает амплитуду другого. Это станет более эффективным, когда частоты идентичны, но это академично: когда начинается флаттер, плохая идея ускоряться дальше.
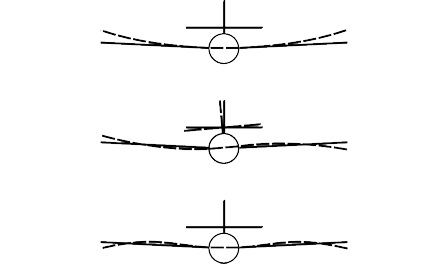
Пример упругого режима: изгиб крыла. Первый режим — это только наконечники, движущиеся вверх и вниз, второй режим-один наконечник вверх, другой вниз, который будет вращать фюзеляж, третий режим (или для педантов: второй симметричный режим) снова оба наконечника вверх, но теперь с секцией среднего пролета вниз и так далее. Они являются гармониками (как и колебания гитарных струн), поэтому их частоты находятся в фиксированном соотношении, причем первый режим имеет самую низкую частоту. Смотрите ниже, сверху вниз.
Пример для аэродинамического режима: Элеронный флаттер, режим быстрого периода (особенно при сцеплении с режимом изгиба в sweptback flying wings).
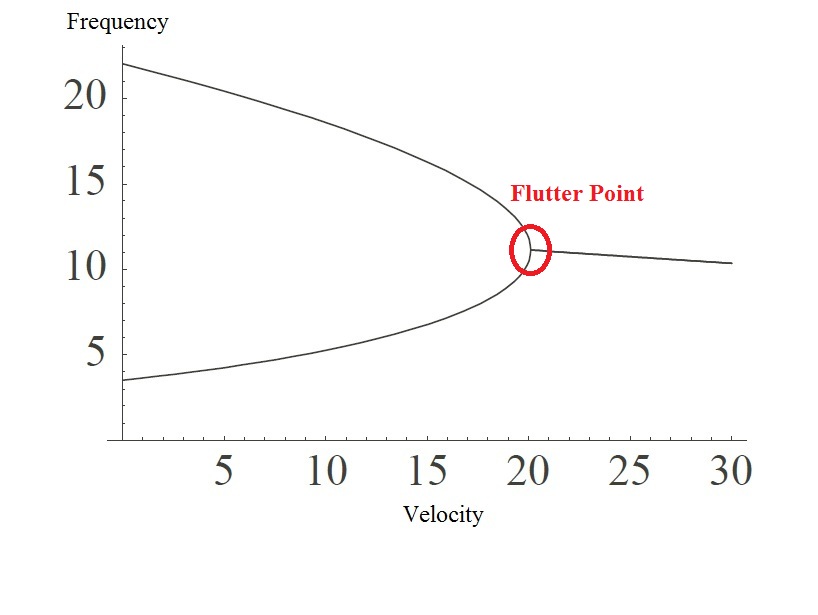
Для меня ваши диаграммы не имеют смысла. Они должны выглядеть так: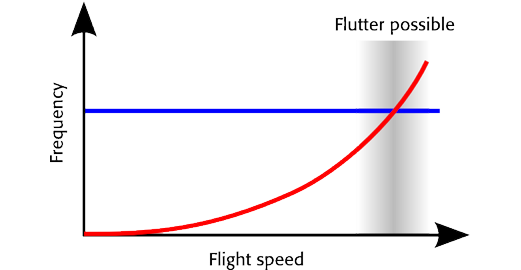
РЕДАКТИРОВАТЬ:
С комментариями Шеллпа я понял, что ответ выше слишком прост. Линии на графике для статического случая упругой вибрации. Как только это крыло перемещается по воздуху, его движение изменит местные аэродинамические силы, которые изменят режимы флаттера. Вызванные движением аэродинамические силы противодействуют упругому движению на низких скоростях, добавляя демпфирование (отрицательное, потому что они уменьшают движение). При демпфировании частота режима уменьшается.
На более высоких скоростях задержки в наращивании давлений означают, что теперь аэродинамические силы отстают от движения, и как только это отставание превышает четверть периода, они производят положительное демпфирование (это неудачная формулировка, так что оставайтесь со мной. Термин демпфирования является отрицательным числом, когда он действительно демпфирует движение, но когда член становится положительным на более высоких скоростях, он все еще называется демпфированием, но теперь движение возбуждается, а не демпфируется в обычном смысле. Итак, давайте теперь будем называть положительное демпфирование «возбуждением»).
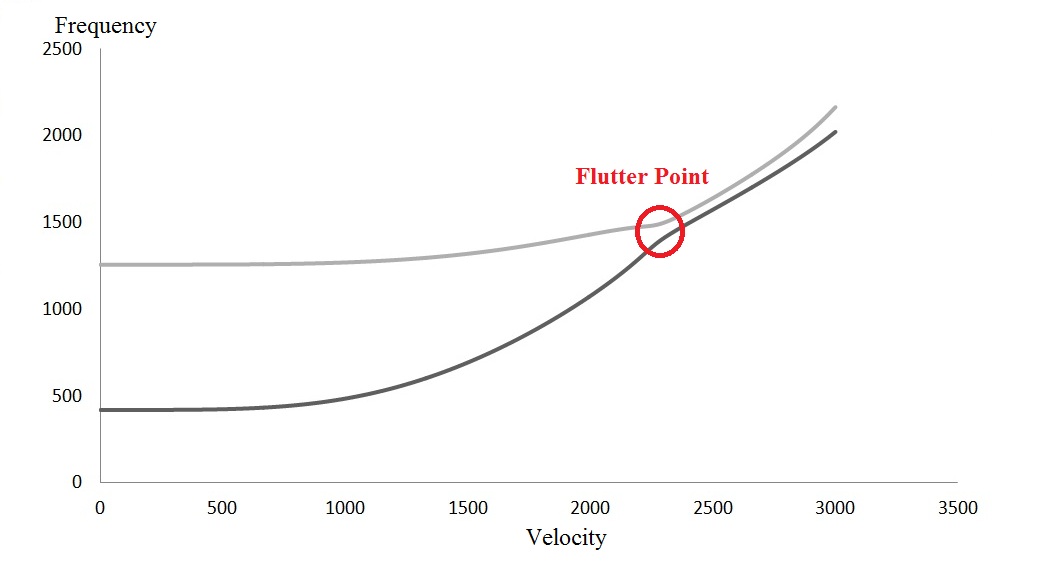
Это возбуждение теперь увеличивает частоту флаттера, поэтому в действительности два явления флаттера теперь сцепляются вместе. Первый график в приведенном выше вопросе показывает, что частота снижается со скоростью, что выглядит необычно для меня. Второй график показывает эту блокировку с увеличением частоты по скорости, но на очень высоких частотах (это должна быть небольшая структура). Если вы хотите, то возбуждение нажимает эластичную частоту вверх, поэтому оба замок совместно без сходиться вполне. Но это не может длиться вечно — на более высоких скоростях они должны расходиться, но на самом деле структура перегружена до того, как это произойдет.
Спасибо, Питер! Мои диаграммы верны[ если у вас все еще есть сомнения, я могу отправить вам несколько статей о теме flutter! 😉 ]. Поведение диаграммы V( скорость полета)-w( частота) зависит от того, какой метод вы используете для вычисления флаттера(p,k,P-K,g и…методы.) Но в целом, дело в том, что 2 частоты становятся идентичными, а знак параметра затухания изменится на положительный знак.
Я читал и видел во многих работах диаграммы, подобные моей второй фигуре, о которой я упоминал выше, но никто из них не упомянул, почему в некоторых случаях эти две частоты не становятся одинаковыми и не сохраняют расстояние! Я был бы признателен, если бы вы могли мне помочь! 🙂
@Shellp: это может быть связано с нелинейными эффектами. Если амплитуда достаточно велика, простые предположения в моем ответе не выполняются, и как упругое, так и аэродинамическое поведение меняются. Смотрите фильм флаттер SB-9 ( youtube.com/watch?v=RenbFgLZBNA ) — обычно флаттер будет расти больше и быстро уничтожить самолет. Нелинейность помогла ограничить амплитуду флаттера. Что касается демпфирования: положительное демпфирование означает, что теперь колебания будут нарастать, а не затухать. Это еще один способ сказать, что флаттер происходит.
Не две моды одинаковой степени свободы сходятся (1-я и 2-я моды являются гармониками, поэтому их отношение частот фиксировано), но флаттер возникает при сближении частот двух разных колебаний. Им не нужно становиться идентичными, просто достаточно близко, чтобы они наращивали амплитуду друг друга.
@ Peter Kämpf: Спасибо за вашу большую помощь. Я хочу знать, почему в некоторых случаях эти 2 режима приближаются, а в некоторых случаях они становятся точно идентичными.
Не будет ли это, возможно, более вероятно, что ответ будет дан в physics.stackexchange.com ?
@Ян: конечно, но это касается всех вопросов о механике полета, аэродинамике и динамике. Этот вопрос находится в области аэроэластики, и достаточно уместно, что он несет этот тег.
@Shellp в вашем втором графике вы выполнили режим отслеживания, чтобы убедиться, что они не пересекаются в точке флаттера?