Это продолжение того, какие данные ACARS отправляет обратно на базу? Может ли он быть использован для отслеживания самолета?
Я задал это как часть предыдущего вопроса, но, похоже, это достаточно большая проблема, чтобы быть отдельной (плюс ответы не охватывали этот аспект).
Все электронные системы связи имеют пакеты (команды) диагностики низкого уровня и проверки каналов. Под pinging я подразумеваю отправку сообщения запроса для конкретной системы и оценку времени отклика на базовой станции или первом приемнике. Повторите процедуру несколько раз и вычислите разницу во времени отклика. (Предположение) если время отклика уменьшается, то самолет движется к приемнику, если оно увеличивается, то самолет будет удаляться. Соедините разницу во времени, полученную из нескольких ответов, с местоположением приемников (которые могут быть спутниками или наземными станциями). Затем приблизьте курс, местоположение или скорость самолета относительно приемника, а затем относительно Земли.
Будет ли такой процесс возможен с ACARS высокоскоростного самолета? Существуют ли какие-либо аспекты, характерные для самолета, которые сделали бы это непрактичным?
Когда ACARS связывает через спутник INMARSAT (другие варианты УКВ или HF к наземным станциям), спутник может пинговать приемник на воздушном судне и определять расстояние от задержки ответа. Спутник является геостационарным, что означает, что он является фиксированной точкой в 35786 км над землей. На основе расстояния от спутника можно рассчитать круг, на котором должен находиться самолет. Это было сделано для MH370.
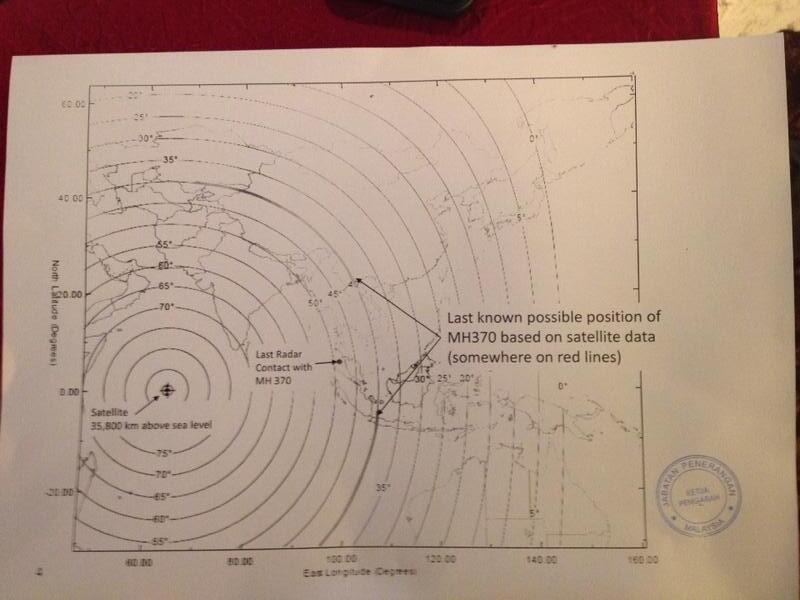
Поскольку геостационарная орбита очень высока, один спутник покрывает большую часть земли. Только один спутник покрывал полет MH370.
Это проблема с «триангуляцией» — для этого нужно как минимум 3 станции, получающие сигнал. Одна станция дает вам круг (который вы можете уменьшить до дуги, учитывая разумные предположения о цели, как это было сделано здесь), две станции дают вам 2 возможных точки (вы можете отказаться от одного — снова, сделав разумные предположения о цели), и 3 дают вам определенное положение исправить.
@voretaq7 проблема с геостационарными спутниками вы всегда будете в конечном итоге с 2 возможными точками, независимо от того, сколько у вас будет, потому что сатураты выровнены на экваторе. Если вы не используете точечные лучи, то вы можете исключить точку.
правда-если все спутники, с которыми ACARS разговаривают, являются геостационарными и выровнены на одной плоскости (например, Экваториальной), вы никогда не получите надлежащего исправления-просто точка в каждом полушарии (равноудаленная на противоположных сторонах плоскости), которую вы должны выбрать между
Теоретически, вы можете триангулировать любой сигнал, который отправляется с корабля, но большая проблема, с которой вы столкнетесь с этим решением, заключается в том, что ACARS срабатывает только каждые полчаса или если двигатель отключает определенные флаги параметров. Опять же, возможность, но не ужасно полезная.
Я полагаю, что авиаконструкторы могли бы пойти дальше и увеличить количество звонков с ACARS, но это не имеет большого смысла, когда все самолеты оснащены несколькими транспондерами и несколькими другими способами связи (например, вызов пилотов по радио, например.)
В конце концов, я думаю, что правильное решение-создать лучшую систему определения местоположения GPS для самолетов. Тот, который пингует центральную систему с местоположением самолета неоднократно. Специально построенная система будет намного лучше, чем пиггайбэкинг-Акары…
Эти интересные посты не отвечают на вопрос, сколько пингов отправлено со спутникаответили с самолета? Опубликованные данные говорят только о последнем пинге. Говорят, что система автоматизирована с помощью спутниковых запросов на периодической основе, по сообщениям, ежечасно. Если бы на каждый из них действительно отвечал самолет, это дало бы восемь наборов данных, каждый из которых мог бы генерировать дугуразграничение возможного положения….в основном восемь концентрических кругов, сосредоточенных на спутникеположение, аналогичное опубликованному.
Один из вышеприведенных постов указывает на то, что такие последовательные данные быстро показывают вектор скорости самолета непосредственно к или от положения спутника…учитывая известное время сигнала и расстояние между концентрическими дугами.
Казалось бы, разумно было бы сделать некоторые предположения о величине общего вектора скорости…это должна быть разумная эффективная крейсерская скорость…скажем, 400 миль в час…или разумный диапазон.
Если было сгенерировано 8 наборов данных, один или несколько из предыдущих наборов должны быть близки ко временикогда положение самолета было известно с радаров. Начиная с этого времени и положения можно использовать фактическую общую скорость для определения пройденного расстояния, что позволит определить два возможных положения (север и юг) на следующей дуге во временной последовательности, т. е. два возможных конкретных местоположения со скоростью и курсом в то время. Затем повторяют эту процедуру от этих позиций до следующей дуги, действительной во временной последовательности, и т.д.
В конце концов, это приведет к двум точкам, северу и югу, на финальной (опубликованной) дуге,представление возможного Северного и возможного Южного местоположения, а также приближениеследов самолета — северных или южных.
Эти нанесенные на карту следы могут быть полезны, особенно в Северном случае, для определения приблизительно того, когда самолет мог войти в радиолокационный диапазон конкретной страны.
Добавление: это действительно вопрос векторов скорости.
Между любыми двумя дугами, предполагая, что у вас есть позиция для начала, вы можете легко определить вектор скорости самолета непосредственно к или от местоположения спутника, проецируемого на поверхность Земли. Эта скорость является известной величиной-это расстояние между двумя дугами, деленное на прошедшее время. Это правда, что мы не знаем фактической скорости, но мы могли бы предположить крейсерскую скорость…эффективная крейсерская скорость для этого самолета, по-видимому, составляет 560 миль в час на 35 000 футов. Таким образом, мы знаем величину этого вектора (наше предположение), но не направление…северо-западный или Южный, учитывая промежуток времени, можно рассчитать расстояние, на которое самолет будет летать за это время. Установите чертежный компас на эту величину, отметьте круг из последнего известного или вычисленного местоположения, а две точки, где этот круг пересекает следующую салелитовую дугу, являются предполагаемыми новыми местоположениями — один север и один юг. В конце концов, это должно привести к ограничению северных и южных частей конечной дуги в качестве более вероятных областей поиска.
Предоставленный… вполне может быть ошибка в предположении крейсерской скорости. Можно было бы предположить верхнюю и нижнюю скорость и создать диапазон возможных местоположений на каждой дуге. При взгляде на целый ряд дуг можно также регулировать предполагаемую крейсерскую скорость и видеть любые изменения направления движения. Если бы у аэрокарфта была отдаленная цель, казалось бы, важно выбрать эффективную крейсерскую скорость для экономии топлива.
Это, вероятно, было бы лучшим комментарием, чем ответом.
Проблема с описываемым вами методом заключается в том, что нет никаких доказательств того, что самолет летел с постоянной скоростью или в постоянном направлении. Из-за этого, действительно единственный пинг, который имеет значение, является последним.
Я бы предложил отредактировать предыдущий вопрос, чтобы сосредоточиться на аспектах, на которые были даны ответы, так как вы разбили это на другой вопрос. Как бы то ни было, я собирался закрыть это как дубликат.