Как часто автопилот обновляет положение элеронов (или любой другой поверхности управления) во время круиза? В секунду, в минуту или что-то еще?
Так часто, что любому наблюдателю (зрительному или тактильному) она кажется непрерывной.
Я говорю это как человек, который имеет 2500 часов эксплуатации самолета транспортной категории. Директор полета обеспечивает непрерывное руководство, за которым непрерывно следует автопилот. Когда вы держите колонку управления с включенным автопилотом (ниже 10k футов вы держите управление даже при включенном автопилоте), вы интерпретируете его как непрерывный ввод (автопилот перемещает элементы управления так же, как если бы другой пилот летал).
Я бы сказал, что то же самое верно для каждого автопилота, который я когда-либо использовал, включая действительно старый Cessna brand Nav-o-Matic или как его там называли.
Согласно статье реконфигурируемая конструкция автопилота для высокоэффективного самолета с использованием модели прогнозирующего управления, каждая поверхность управления обновляется с разной скоростью в зависимости от потребностей всей системы. То, что они использовали в своих экспериментах (и, скорее всего, не то же самое в каждом самолете, потому что они будут проверять, чтобы увидеть, что требуется), выглядит следующим образом:
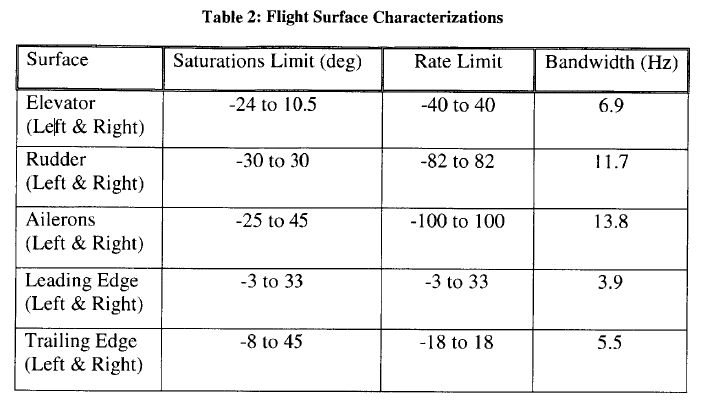
Столбец полосы пропускания показывает, как часто обновляется поверхность управления, и колеблется от 3,9 раза в секунду (на медленно движущейся передней кромке крыла) до 13,8 раз в секунду (на элероне из-за быстрой реакции самолета на входы управления креном).
Это фиксированное значение, выбранное во время проектирования системы, и не изменяется в зависимости от фазы полета (так что это будет то же самое, будь то в круизе или в конфигурации посадки).
В более общем плане в документе также упоминается, что скорость управления между 5 Гц и 20 Гц достаточна для большинства самолетов.
Это не только вопрос конкретного автопилота, но и вопрос конкретного дизайна, который будет отличаться в зависимости от OEM (производителя оригинального оборудования) и спецификации самолета.
Обычно в современных самолетах автопилот посылает команды в систему управления полетом, которая затем посылает команды на исполнительные механизмы, и эта последовательность команд происходит с разной скоростью. Эта частота обновления может составлять, например, 100 Гц (10 мс), 80 Гц (12,5 МС) или может быть еще медленнее или быстрее, в зависимости от системы управления полетом воздушного судна.
Таким образом, команда отправляется не в секунду или минуту, а скорее 100 команд в секунду, потому что команды для перемещения поверхности управления являются наиболее важными командами на самолете.
Ну, я помню, как делал ночной рейс из Японии в Великобританию над Россиейв JAl 747 и прекрасный вид на крыло, и ночной старт и все..
И одна вещь, которую я заметил, это то, что внутренний airelonдвигался раз в четыре секунды, как в перемене, следующий, следующий, следующий.никакой предсказуемости не будет ни вверх, ни вниз, ни как-то еще..просто, может быть, 10 см движение или меньше, непрерывно..было приятно смотреть и какой-то ПИД-контроллер..http://en.wikipedia.org/wiki/PID_controller
Пид-контроллеры могут быть в значительной степени в режиме реального времени-может быть, это просто не было заметно за время между ними.
@Qantas94heavy PID петли могут работать очень быстро или очень медленно в зависимости от того, как они разработаны. Они также могут быть быстрыми, но только делают физическую настройку реже. Я не уверен, как они реализованы в автопилотах, но петли PID имеют широкий спектр реализаций.
@lnafziger: вот почему я сказал, может … Но независимо от того, это может быть минимальное движение встроенного элерона, что делает его похожим на корпус, а не на контроллер.
Это зависит от производителя и модели.
Хотя можно создать автопилот, который обновляется в режиме реального времени/непрерывно, не все автопилоты на самом деле предназначены для этого. Некоторые автопилоты (особенно старые) обновляются раз в минуту, иногда даже медленнее. Для этого есть несколько логических причин: одна — для экономии энергии, другая — для снижения стоимости-раньше медленные компьютеры были значительно дешевле, чем те, которые были достаточно быстры для вычисления реального времени. Кроме того, просто не нужно постоянно обновлять поверхности управления. Скажем, вы отклоняетесь от курса на пару сотен футов, потому что ветер изменился, автопилот исправится в течение следующей минуты, и вы в конечном итоге продолжите весело, и вы (как пилот или пассажир) не заметили бы. Единственное время, когда вам нужны постоянные обновления рулей и оборотов двигателя, во время посадки, и если я не ошибаюсь, на рынке нет полностью автономного посадочного автопилота (для гражданских самолетов так или иначе).
Фактически, автопилот, который постоянно обновляет поверхности управления, может в конечном итоге создать резкий полет, потому что он постоянно автоматически корректируется для порывов ветра и изменений в направлении ветра.
777 и, вероятно , по крайней мере, несколько других крупных современных авиалайнеров имеют возможности autoland, но часто не могут использовать его из-за наличия наземного оборудования.
Я согласен со многим из того, что вы говорите, но, как упоминает эгид, есть множество самолетов с возможностью autoland. Кроме того, у вас может быть автопилот, который постоянно настраивается и не является рывком. Это то, для чего предназначены сервоприводы и петли PID!
Одноминутное обновление невозможно, если у вас нет совершенно стабильного самолета (скажем, баллона или дирижабля).
@Yankeekilo высокого крыла Cessnas будет летать прямо и уровень самостоятельно, автопилот, который обновляется один раз в минуту достаточно, чтобы внести коррективы курса.