Просматривая учебник о том, как работать с Garmin GNS430, я не мог найти никакой информации о том, как устройство сообщит об ухудшенном или низком сигнале точности. Каковы требования к точности для авиационных навигационных систем GPS и как они должны предупреждать пользователя в случае ситуации с пониженной точностью?
Я конкретно не спрашиваю о RAIM здесь, поскольку я считаю, что это в основном предназначено для выявления неисправного спутника или скомпрометированного сигнала. Примером сценария может служить некоторое атмосферное состояние, которое снижает точность позиционирования до 1/4 мили или меньше.
Необходимая точность GPS зависит главным образом от применения. Требования к маршрутам являются более мягкими, чем требования к точности для неточных подходов.
Точность GPS является результатом неточностей в сигнале в сочетании с фактором, основанным на геометрии спутников. Таким образом, в приемнике ошибка положения оценивается путем просмотра
- Геометрия сателлитов, способствующих фиксации положения
- Оцененная пользовательская эквивалентная ошибка ранжирования (UERE), вызванная различными возмущениями
Из геометрии спутников вычисляется ( геометрическое) разбавление точности (DOP). Это число выражает, как геометрия спутников, используемых для вычисления положения, влияет на точность решения положения. В идеальной ситуации, DOP=1
, любое значение чем 4
считается хорошим.
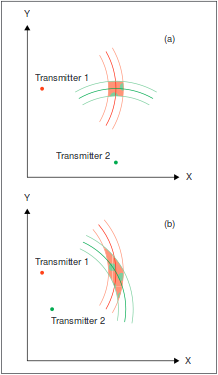
DOP можно разделить в 3 компонентах, горизонтальном (HDOP), вертикальном (VDOP) и времени (TDOP). Для точности горизонтального положения используется HDOP.
Вторым фактором в оценке точности является пользовательская эквивалентная ошибка ранжирования (UERE). На рисунке выше показана ширина диапазонных полос. UERE состоит из различных факторов:
- Эфемеридные данные-ошибки в переданном местоположении спутника
- Спутниковые часы-ошибки в передаваемых часах.
- Ионосфера-ошибки в измерениях псевдодальности, вызванные ионосферными эффектами
- Тропосфера-ошибки в измерениях псевдодальности, вызванные тропосферными эффектами
- Многолучевые ошибки, вызванные отраженными сигналами, входящими в антенну приемника
- Приемник-ошибки в измерении диапазона приемником, вызванные различными внутренними факторами.
Влияние ошибки данных эфемериды составляет порядка 2 метров (стандартное отклонение).
Точность спутниковых часов преднамеренно ухудшалась в рамках программы выборочной доступности. SA был превращен в мае 2000 года, резко улучшив точность GPS. Приемники, разработанные до этой даты, не знают об этом изменении и оценят худшую точность, чем они фактически достигнут. 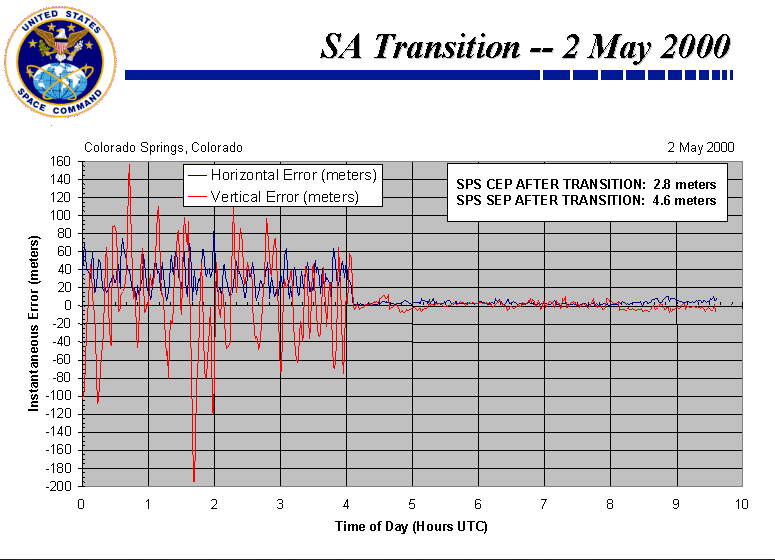 … Остаточная ошибка часов после поворота SA эквивалентна примерно 2,5 метрам (стандартное отклонение).
… Остаточная ошибка часов после поворота SA эквивалентна примерно 2,5 метрам (стандартное отклонение).
Сигнал GPS включает в себя параметры для ионосферной модели, которые могут быть использованы для коррекции ионосферных эффектов. Остаточная ошибка, вызванная задержкой сигнала в ионосфере, составляет порядка 5 метров (стандартное отклонение). Это самый значительный вклад в УЭРЭ.
Тропосферные эффекты намного меньше, чем ионосферные. Эффект составляет около 0,5 м (стандартное отклонение).
Многолучевые эффекты (вызванные отражениями сигналов) очень сильно зависят от окружающей среды. В городе последствия хуже, чем в воздухе. Для бортовых применений многолучевость может быть вызвана отражениями сигнала от крыльев. Эффект очень ограничен. На поверхности аэропорта могут быть значительные эффекты, особенно вблизи зданий.
Ошибки приемника, вызванные нестабильными генераторами (тепловой шум), ошибки квантования и округления, ошибки программного обеспечения и т.д. Этот вклад может быть уменьшен путем улучшать конструкцию антенны и приемника; который все приходит на цену. Оценим вклады в УЕРЕ около 3 метров.
UERE является корнем среднего квадрата всех этих вкладов.
Точность 95% после этого оценена мимо 2×UERE×HDOP
. Для HDOP 2
, позиция будет оцениваться в пределах 27 метров 95% времени. Типичная точность лучше, поскольку коэффициенты Уэре оцениваются достаточно консервативно.
Системы увеличения как WAAS и GBAS могут улучшить точность GPS путем посылка сигналов коррекции. GNS 430 (без ‘W’) не использует эти сигналы.
Если DOP больше 4
, GNS 430 отобразит сообщение «ухудшенная точность». Вы можете найти DOP на странице состояния спутника. На этой странице также показана расчетная ошибка позиции.
Обратите внимание, что все расчеты для оценки ошибки позиции предполагают, что GPS работает так, как должен, т. е. без сбоев. Сбои могут возникать в работе спутников, при передаче данных на приемник и в сам приемник. Обнаружение неисправностей является частью функции RAIM.
Круто…. Я почти боюсь спросить, но изменилось ли что-нибудь с WAAS?
Использование WAAS UERE будет уменьшено, и поэтому точность улучшена. Также преимущества целостности (обнаружения недостатка).
Необходимо добавить, что чем выше вы, тем лучше вертикальная точность; метеосферные события значительно влияют на рефракцию, а рефракция в основном влияет на вертикальный измеритель, а не на горизонтальный.