
Это может быть только для внешнего вида, но размещение Ротора оказывает заметное влияние на поведение квадрокоптера.
Чем выше роторы на раме, тем выше будет центр подъема (центр подъема для квадрокоптеров-центр плоскости, создаваемой роторами).) Высокий центр подъема означает, что рама будет более стабильной . Низкий центр подъема означает обратное. Причина этого в том, что квадрокоптер может лучше справляться с боковыми вращательными силами на своей раме. Центр подъема, находящийся над центром масс, означает, что рама «висит», как маятник. Если вы приложите к нему боковую силу, он, естественно, вернется на место, и чем больше вы нажмете, тем «сложнее» он станет перемещать рамку.
Центр подъема, который находится в том же месте, что и центр масс рамы, означает, что нет маятникового эффекта. Это похоже на балансировку мяча поверх другого мяча. Все боковые силы, или внутренние как изменения на силе каждого роторов или внешние как возмущения ветра имеют максимальное влияние в двигать рамку.
Вопреки тому, что вы можете подумать, стабильность-это не то, что вы хотите в квадрокоптере. Чем более нестабильна рама, тем более гибкой она становится. Небольшие изменения в силе Ротора создадут большие вращательные движения. Штраф, который вы платите за это (небольшие, непредсказуемые внешние силы также создают большие вращательные движения), вы компенсируете вычислительной мощностью. Процессоры теперь настолько быстры, а датчики настолько чувствительны, что они легко могут вычислить внешние силы и создать ответ достаточно быстро, чтобы держать кадр в полете.
На самом деле перемещение центра подъема вверх или вниз абсолютно ничего не делает для стабильности квадрокоптера. Нет механизма для сдвига или крена вектора подъемной силы при наклоне самолета, поэтому вектор подъемной силы проходит через центр тяжести, что делает корабль нейтрально стабильным в любом случае. Я также думал, что это влияет на стабильность, прежде чем я был исправлен pdel здесь .
Я думаю, что то, что вы говорите, правильно, только если вектор подъема не меняет направление (pdel также комментирует это.) Это не верно для квадрокоптера.
Извините за двойной комментарий, но, взгляните на это также: eprints.qut.edu.au/33767/1/33767.pdf под » 4.4 конструкция для оптимальной чувствительности»
Я поверю, что есть эффект, который может наклонять или смещать общий вектор подъема при банковском обслуживании, но я этого не вижу, и я не нашел никакого вывода в этой статье (и большинство квадроциклов не имеют хлопающих роторов, поэтому обсуждение с этого момента может даже не применяться).
Я не уверен, что понимаю вас, если честно. Квадрокоптер может вращать свой полный вектор подъема, вращая один или два соседних Ротора быстрее, чем другие. Вектор подъема будет вращаться в сторону роторов, которые вращаются быстрее по отношению к вектору веса, который всегда направлен вниз. Так квадрокоптеры перемещаются в боковом направлении…
Основная причина связана с тем, как оружие влияет на аэродинамическую эффективность двигателей. Удар ниже, когда рычаги находятся на стороне воздухозаборника пропеллера, а не в downwash. Это на самом деле довольно удивительно, что большинство мульти-роторов не имеют направленный вниз реквизит. Одной из причин может быть то, что становится сложнее механически реализовать посадочные салазки с направленными вниз подпорками.
@Эйби прав, но его ответ немного короткий. Позвольте мне дать некоторые предпосылки.
Пропеллеры работают путем ускорения воздуха. Если вы думаете о трубе потока, через которую проходит весь воздух, который будет проходить через диск пропеллера, диаметр этой трубки больше диаметра самого пропеллера перед пропеллером и меньше позади него. Поскольку воздух течет быстрее за пропеллером, тот же массовый поток требует меньшего поперечного сечения трубки. Пропеллер всасывает воздух внутри, поэтому увеличение скорости начинает на некотором расстоянии вперед, и поднимает давление в диске, поэтому больше увеличения скорости следовать за пропеллером когда давление p
в потокотрубе падает до уровня давление окружающего воздуха п∞
.
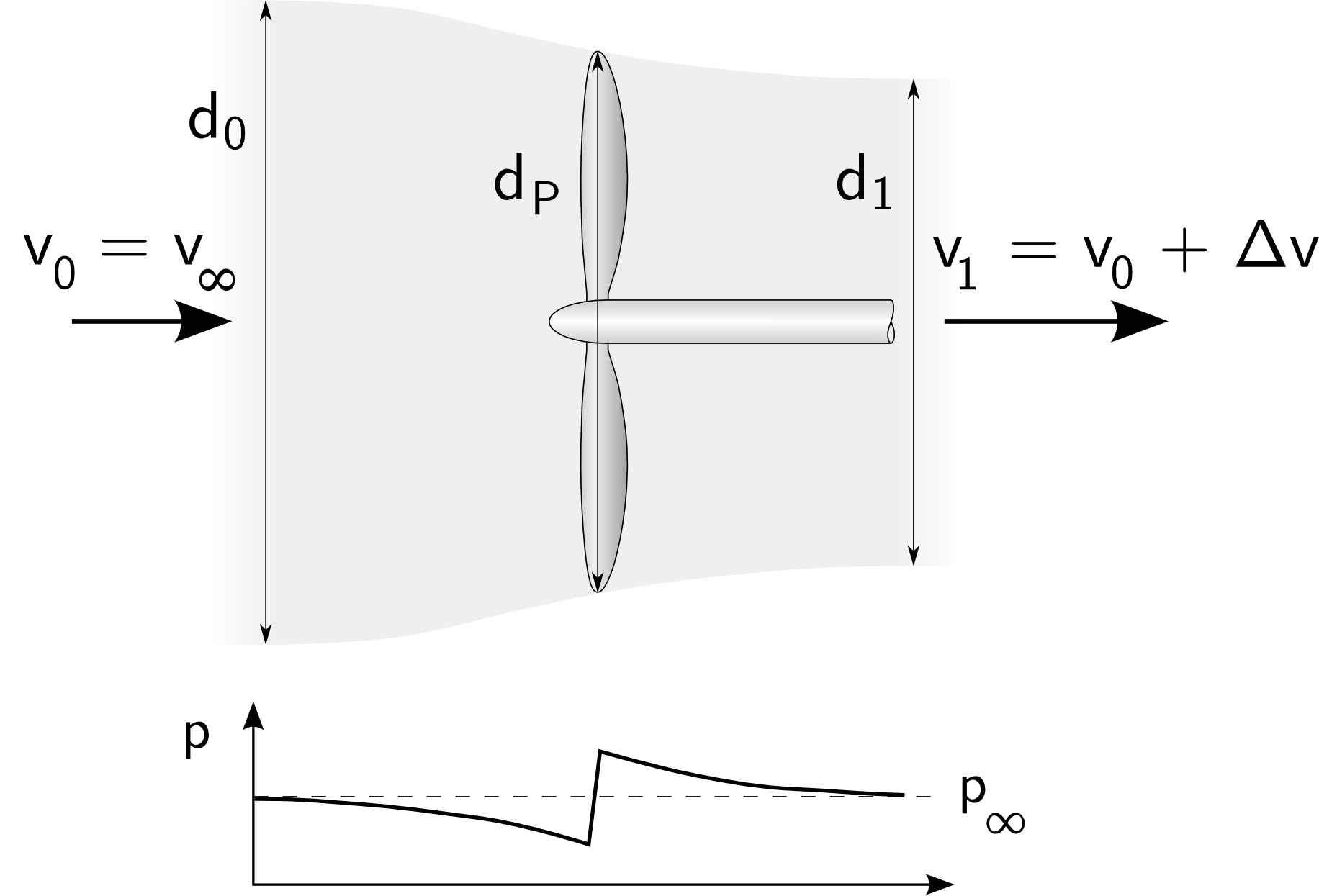
Стойка, расположенная перед пропеллером, будет иметь меньшее динамическое давление, чем стойка, расположенная за ним. Поверните изображение выше на 90° против часовой стрелки, и у вас есть расположение пропеллера quadcopter. Сделайте начальную скорость в∞
ноль, и у вас есть ситуация для квадрокоптера в парящем полете. Следствие: пропеллеры ниже стойки будут иметь более высокую эффективность.
Полное раскрытие: картина Выше идеализирована-на самом деле воздух за пропеллером будет смешиваться с окружающим его воздухом, который будет тащиться. Идеализация streamtube дает простой способ расчета тяги пропеллера в сочетании с предположением одинаковой скорости воздуха по поперечному сечению трубки потока, но в действительности распределение скорости неравномерно, с постепенным уменьшением с большим расстоянием от оси симметрии.
Добро пожаловать в Aviation SE! Я полагаю, что, если вы летите в помещении, вы не рискуете ударить роторы на потолке. Кроме этого, это просто для внешнего вида.
Я бы заподозрил что-то со сжатием против нагрузки на валы двигателя, но я не думаю, что вы можете получить окончательный ответ от кого-либо, кроме фактического дизайнера.